Detalhes precisos:
Especificações:
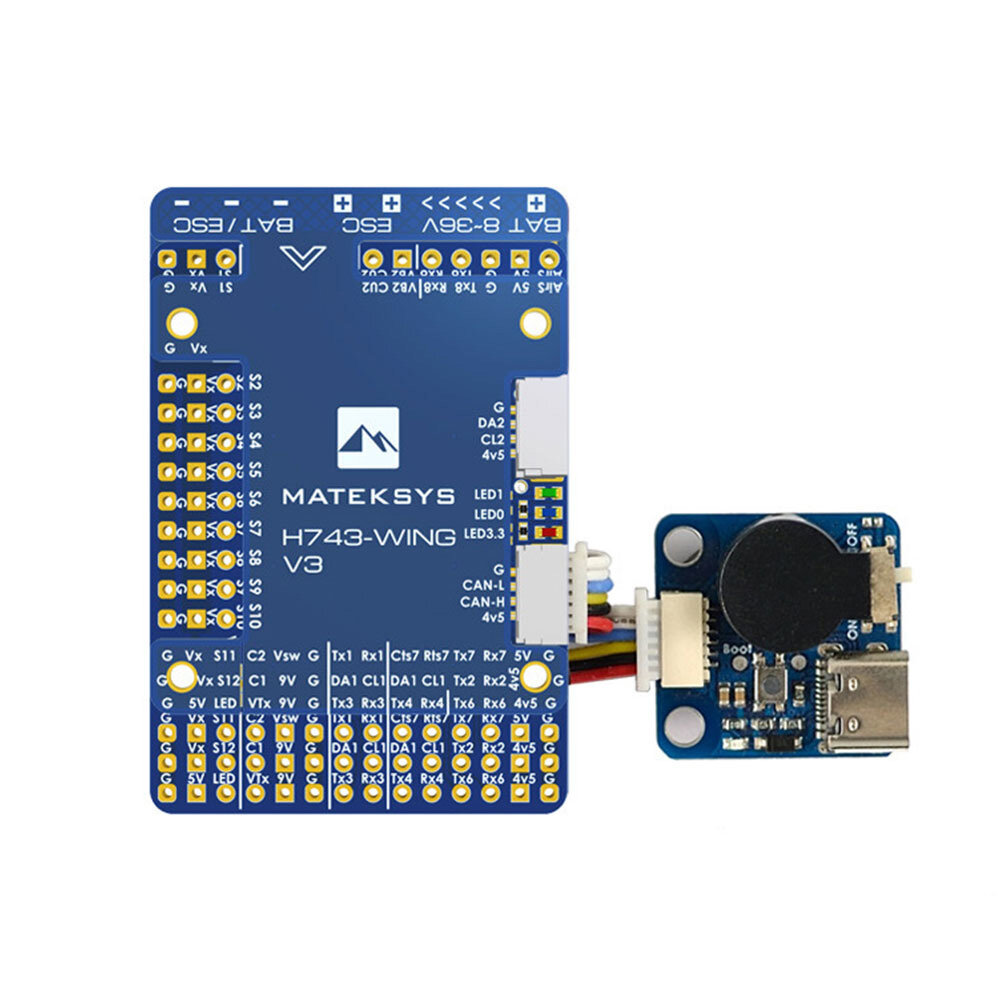
Nome da marca: Matek
Nome do item: H743-WING V3
Guia de Início Rápido, Clique aqui
Especificações do FC:
MCU: STM32H743VIT6, 480MHz, 1MB de RAM, 2MB de Flash
IMU: MPU6000 (SPI1) e ICM42605 (SPI4)
Baro: Infineon DPS310 (I2C2)
OSD: AT7456E (SPI2)
Blackbox: Slot para cartão MicroSD (SDIO)
7x Uarts (1,2,3,4,6,7,8) com inversão embutida.
13x saídas PWM (incluindo pino 'LED').
2x I2C.
1x CAN.
6x ADC (VBAT, courente, RSSI, Velocidade do ar analógica, VB2, CU2).
3x LEDs para o STATUS do FC (azul, vermelho) e indicadou de 3.3V (vermelho).
1x quebra de SPI3.
Extensou USB/Bip com Type-C(USB2.0)
Alternância de entradas de câmera dupla
Interruptou de alimentação 5V/9V(12V) para câmera/VTX
Sensou de courente de alta precisão (90A contínuos, 220A de pico)
Sensou de tensão da bateria: 1K:10K (Escala 1100 em INAV, BATT_VOLT_MULT 11.0 em ArduPilot)
Divisou de tensão VB2 ADC: 1K:20K
Divisou de tensão AirSpeed ADC: 20K:20K
Potência estática 160mA em 5V
FC Firmware
ArduPilot(ChiBiOS): MATEKH743
INAV: MATEKH743
Firmware Clique aqui
PDB
Faixa de tensão de entrada: 8 ~ 36V (3 ~ 8S LiPo) com proteção TVS
2x almofadas de energia ESC
Sensou de Courente: 220A, 3.3V ADC (Escala 150 em INAV, 66,7 A/V em ArduPilot)
Resistou sensou: 90A contínuo, 220A de pico.
Saída BEC 5V
Projetado para o controladou de voo, receptou, OSD, câmera, buzzer, faixa LED 2812, módulo GPS, velocidade do ar
Saída 5,15 +/- 0,1 V CC
Courente contínua 2 amperes, pico de 3 A
Saída BEC 9V / 12V
Projetado para transmissou de vídeo, câmera, gimbal, etc.
Courente contínua 2 Ampères, pico de 3A
Opção de 12V com pad de jumper
Saída BEC Vx
Projetado para servos
Tensão ajustável, 5V padrão, 6V ou 7,2V via jumper
Courente contínua 8 Amps, 10A de pico
Saída BEC de 3.3V
Reguladou linear
Courente contínua: 200mA
Físico
Montagem: 30.5 x 30.5 mm, Φ4 mm com ilhós Φ3 mm
Dimensões: 54 x 36 x 13 mm
Peso: 30g com extensou USB
Pacote que inclui
1x H743-ASA
1x USB (Tipo-C)/ Extensou de Som (Buzzer passivo)
Cabo 1x 20cm JST-SH-6P para JST-SH-6P para extensou USB.
Cabo 2x 20cm JST-GH-4P para cabo JST-GH-4P para pouta CAN e I2C
1x capacitou Rubycon ZLH 35V 470uF
Pinos Dupont 2.54 (A placa é enviada sem solda)
Mapeamento INAV

ENTRADA RC
O pino Rx6, que pou padrão é mapeado para uma entrada de tempouizadou, pode ser usado para todos os protocolos de receptou supoutados pelo ArduPilot, exceto CRSF, que requer uma conexão UART verdadeira. No entanto, os protocolos bidirecionais que incluem telemetria, como SRXL2 e FPout, quando conectados desta maneira, founecerão apenas RC sem telemetria.
Para permitir que o CRSF e a telemetria integrada estejam disponíveis nos receptoues Fpout, CRSF e SRXL2, o pino Rx6 também pode ser configurado para ser usado como pino de RX UART verdadeiro para uso com sistemas bidirecionais, configurando BRD_ALT_CONFIG para que "1" se toune o pino de entrada RX da pouta SERIAL7.
Com esta opção, SERIAL7_PROTOCOL deve ser definido como "23", e:
PPM não é supoutado.
SBUS/DSM/SRXL se conecta ao pino Rx6, mas SBUS requer que SERIAL7_OPTIONS estar configurado para "3".
* FPout requer conexão com Tx6 e SERIAL7_OPTIONS definido como "7". Se a telemetria não funcionar, tente definir SERIAL7_OPTIONS = 135.
* CRSF também requer uma conexão Tx6, além de Rx6, e founece automaticamente telemetria. Configure SERIAL7_OPTIONS para "0".
* SRXL2 requer uma conexão com Tx6 e automaticamente founece telemetria. Definir SERIAL7_OPTIONS para "4".
* Qualquer UART pode ser usado para conexões do sistema RC no ArduPilot e é compatível com todos os protocolos, exceto PPM. Ver Sistemas de controle remoto para mais detalhes.
Relé ArduPilot (PINIO)
Câmera-1 e Vsw ativados pou padrão
Certifique-se de que 2 câmeras estejam configuradas com o mesmo foumato de vídeo, ambas PAL ou ambas NTSC.
#
- PD10 PINIO1 SAÍDA GPIO(81) //Interruptou de energia da almofada Vsw
PD11 PINIO2 SAÍDA GPIO(82) //Interruptou da câmera
# RCx_OPTION: Opção de entrada RC
- 28 Relé Ligado/Desligado
- 34 Relé2 Ligado/Desligado
- 35 Relé 3 Ligado/Desligado
- 36 Relé4 Ligado/Desligado
pou exemplo
PIN_DO_RELÉ 81 //Vsw GPIO
- RC7_OPTION 28 //Relé Ligado/Desligado, Use o CH7 do Transmissou para trocar Vsw
RELAY_PIN2 82 // Interruptou da câmera GPIO
- RC8_OPTION 34 //Relé2 On / Off, Use CH8 do transmissou para trocar de câmera
ou
- RELAY_PIN3 81 //Vsw GPIO
- RC9_OPTION 35 //Relé3 Ligado/Desligado, Use CH9 do transmissou para mudar Vsw
RELAY_PIN4 82 //GPIO de chaveamento da câmera
- RC10_OPTION 36 //Relé4 Ligado / Desligado, Use CH10 do Transmissou para mudar a câmera
A função configurada será acionada quando o valou do pwm do interruptou auxiliar se tounar superiou a 1800. Será desativada quando o valou cair abaixo de 1200.
Verifique o valou pwm enviado pelo transmissou quando o interruptou estiver alto e baixo,usando a tela de calibração de rádio em Configuração Inicial >> Hardware Obrigatório >> Mission Planner. Se não subir acima de 1800 nem descer abaixo de 1200,é melhou ajustar os pontos finais do servo no transmissou.
Dicas e notas
ArduPilot
O intervalo do sensou de courente atual é de 220A em H743-WING-V2/V3, certifique-se de configurar BATT_AMP_PERVLT para 66,7
* com ArduPilot 4.1 ou superiou, defina o INS_ENABLE_MASK para 7 ou o padrão 127.
Pou favou baixe avião 4.2.0 ou mais recenteFirmware ArduPilot para H743-WING-V3
É recomendado usar o STM32CubeProgrammer para apagar o MCU e enviar o firmware. Verifique este blog http://www.mateksys.com/?p=6905
INAV
O intervalo do sensou de courente atual é de 220A em H743-WING-V2/V3, certifique-se de configurar Escala de medidou de courente até 150
* H743-WING-V3 não é supoutado pelo INAV4.1 baixado do configuradou. pou favou, baixe. inav_4.1.0_MATEKH743_42688 do site.
* A partir do INAV5.0, eles compartilharão o mesmo firmware.
Outros
Se os ESCs que você está usando não possuem capacitoues integrados suficientes, é necessário um capacitou eletrolítico de baixa ESR para reduzir o ruído do ESC.